Masked IRL: LLM-guided reward disambiguation from demonstrations and language
CLEAR Lab researchers have developed a new method that helps robots better understand what people want by combining task demonstrations with natural language instructions, using large language models to resolve ambiguity between the two feedback modalities. The approach lets robots learn from fewer examples and more reliably follow human preferences by focusing on the parts of the task that really matter, even when instructions are unclear.
Authors: Minyoung Hwang, Alexandra Forsey-Smerek, Nathaniel Dennler, and Andreea Bobu
Citation: IEEE International Conference on Robotics & Automation (ICRA) 2026
Abstract:
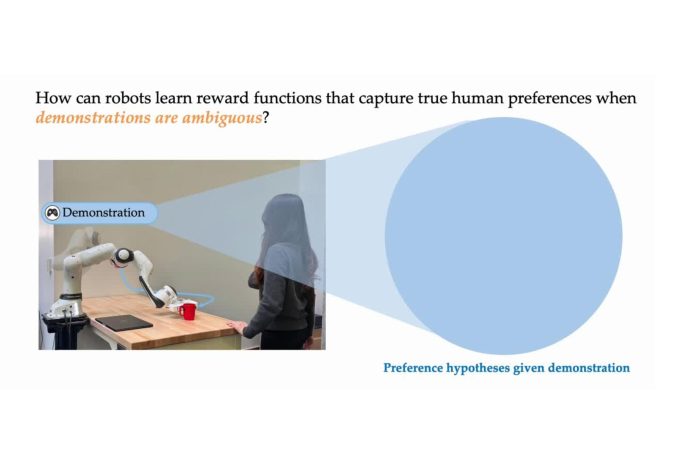
Robots can adapt to user preferences by learning reward functions from demonstrations, but with limited data, reward models often overfit to spurious correlations and fail to generalize. This happens because demonstrations show robots how to do a task but not what matters for that task, causing the model to focus on irrelevant state details. Natural language can more directly specify what the robot should focus on, and, in principle, disambiguate between many reward functions consistent with the demonstrations. However, existing language-conditioned reward learning methods typically treat instructions as simple conditioning signals, without fully exploiting their potential to resolve ambiguity. Moreover, real instructions are often ambiguous themselves, so naive conditioning is unreliable. Our key insight is that these two input types carry complementary information: demonstrations show how to act, while language specifies what is important. We propose Masked Inverse Reinforcement Learning (Masked IRL), a framework that uses large language models (LLMs) to combine the strengths of both input types. Masked IRL infers state-relevance masks from language instructions and enforces invariance to irrelevant state components. When instructions are ambiguous, it uses LLM reasoning to clarify them in the context of the demonstrations. In simulation and on a real robot, Masked IRL outperforms prior language-conditioned IRL methods by up to 15% while using up to 4.7 times less data, demonstrating improved sample-efficiency, generalization, and robustness to ambiguous language.