
MIT’s Reconfigurable Robot wins Best Technical Paper at NASA’s BIG Idea Challenge Forum
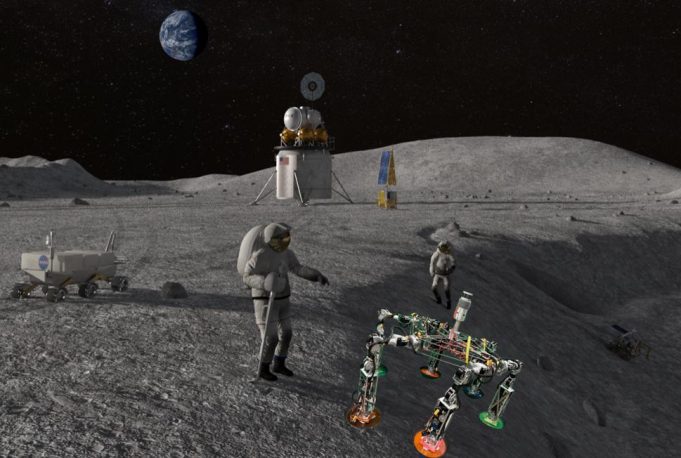
An interdisciplinary MIT team received the “Best Technical Paper” award at the 2022 NASA BIG Idea Challenge forum in November for their demonstration of a proof-of-concept of a novel platform architecture for reconfigurable lunar robots. A team of eight undergraduate students and four graduate students traveled to Pasadena, Calif. to present and perform two demonstrations of their project, the Walking, Oligomeric, Robotic Mobility System (WORMS).
NASA’s “Breakthrough, Innovative and Game-changing (BIG)” Idea Challenge is a competition that calls for radical ideas from the academic community to support the agency’s “efforts to rapidly mature innovative and high-impact capabilities and technologies for infusion in a broad array of future NASA missions.” This year, participants were challenged to develop alternative modalities for accessing extreme lunar terrain not currently accessible by wheeled robots. Finalist teams, like WORMS, received NASA and Space Grant-affiliated funding of up to $180,000.
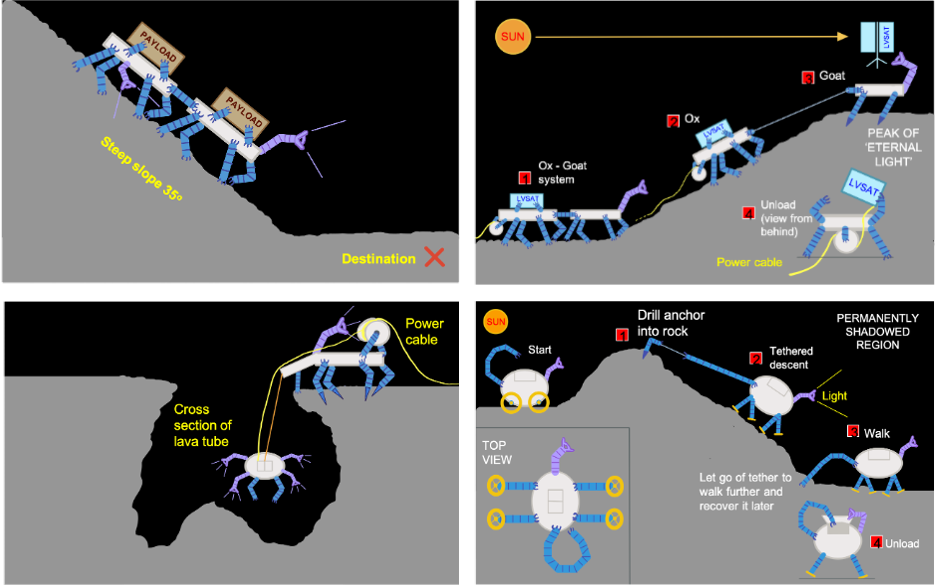
WORMS uses a handful of architectural elements that can be assembled in different configurations in the field for different kinds of missions. Each appendage, referred to as a “Worm”, is an independent robot equipped with its own actuators, sensors, computer and battery. All Worms are identical and can be connected to various accessories, such as pallets, containers and shoes via their user-friendly Universal Interface Blocks (UIB). Accessories can be combined with Worms in different ways to yield a variety of animal-like robot configurations that enable WORMS to carry heavy loads (with pallets and containers), walk on rough or steep terrain (with shoes), or lower a payload into a lava tube (with a winch).
UIBs are designed to be user-friendly, so that WORMS robots can be assembled and maintained by non-specialists while in the field.
The team envisions that new WORMS configurations could be beamed to Artemis Base Camp at the lunar South pole at the speed of light, assembled within minutes from Worms and Accessories kept in stock at the base, and then programmed for a unique mission. Worms can share their electrical power reserves and communicate with each other to coordinate their movements. When a mission is completed, a WORMS robot can be easily disassembled and reassembled for a new mission. The WORMS architecture, motivated by a desire to prevent the emergence of a “robot zoo” at Artemis Base Camp, simplifies logistics, delivers high flexibility and reliability at low lifetime cost and protects NASA’s lunar robotics investments from obsolescence.
The WORMS team includes undergraduate and graduate students spanning the Department of Aeronautics and Astronautics (AeroAstro), the Department of Electrical Engineering and Computer Science (EECS), and the Department of Mechanical Engineering, and one student from Carnegie Mellon University. At the NASA BIG Idea Challenge forum in November, the team presented the WORMS-1 proof of concept prototype, which consists of six Worms, with shoes, connected to a pallet with UIBs and a LiDAR Species Module, or “mapper.” As demonstrated, a mission-ready version of WORMS-1 could be used to map a permanently shadowed region at the lunar South pole previously unreachable by wheeled robots.
The team anticipates that WORMS will evolve over three generations with the ultimate goal of a 1.9-ton payload capacity, 2.5 kWh battery per Worm, autonomous connection and disconnection of UIBs, and a flexible gait that can easily adapt to the rocky lunar surface. Future development may include attachments like a charger, navigator, anchoring drill, winch and cable, telescopic jack, wheel and electric motor, laser, electromagnet and additional batteries, which would allow WORMS to undertake a range of missions including re-charging other robots and rovers, helping build and move infrastructure for future lunar settlements, exploring lava tubes, pits and ridges, and gathering data to support lunar science and exploration.
WORMS is led by team lead George Lordos, AeroAstro PhD candidate and deputy team lead Michael Brown, AeroAstro SM candidate. Teammates include undergraduates Brooke Bensche ‘23 (AeroAstro), Tomás Cantu ‘25 (AeroAstro), Cynthia Cao ‘25 (AeroAstro), Aileen Liao ‘25 (MechE and EECS), Fiona Lin ‘24 (EECS), Prajwal Mahesh ‘23 (MechE), Cesar Meza ’25 (AeroAstro), Anna Mokkapati ‘25 (EECS), Chiara Rissola ‘24 (Carnegie Mellon University), Diego Rivero ‘25 (EECS), Jacob Rodriguez ‘24 (AeroAstro), Jessica Rutledge ‘25 (AeroAstro), Katherina Sapozhnikov ‘24 (MechE), Sharmi Shah ‘23 (MechE), Steven Reyes ‘25 (EECS), Fatema Zaman ’25 (EECS); and graduate students Yang Chen (PhD candidate, AeroAstro), Paula do Vale Pereira PhD‘22 (AeroAstro), Kir Latyshev (PhD candidate, AeroAstro), Aditya Mehrotra (SM candidate, MechE), Alex Miller (PhD candidate, AeroAstro), Cormac O’Neill (PhD candidate, MechE), and John Zhang (PhD candidate, MechE). The team’s faculty advisors were Jeffrey Hoffman, Olivier de Weck, David Trumper and Sang-bae Kim of MIT, and Wendell Chun from the University of Denver.
The NASA BIG Idea Challenge is a year-and-a-half long program funded by the Game Changing Development program in NASA’s Space Technology Mission Directorate (STMD) and NASA’s Office of Stem Engagement’s National Space Grant and Fellowship (Space Grant) project. The WORMS industry partners include Boston Dynamics, MassRobotics and Robots5.
The team plans to continue development of WORMS during 2023 with support from the Space Resources Workshop and the AeroAstro Department’s new class in Planetary Surface Technology Development (16.S896-G and 16.S688-U) which will be taught by George Lordos, Jeffrey Hoffman and Olivier de Weck.

