
MIT-led team selected as finalist at NASA’s BIG Idea Challenge
Walking Oligomeric Robotic Mobility System (WORMS) will enable access to extreme lunar terrain
The AeroAstro Space Resources Workshop’s latest team project, the Walking, Oligomeric, Robotic Mobility System (WORMS), has been selected as a finalist by NASA’s 2022 BIG Idea Challenge. The team received $175K to build and demonstrate their prototype, and they will perform a demonstration at NASA Jet Propulsion Lab in November 2022.
When it came time to design their system, the interdisciplinary team took inspiration from LEGO and a diverse array of animals, including spiders, goats, oxen, and penguins. The goal: design a versatile mobility system that can support the field attachment of mobility elements to large lunar infrastructure modules and the in-the-field rapid configuration and maintenance of a large variety of modular robots.
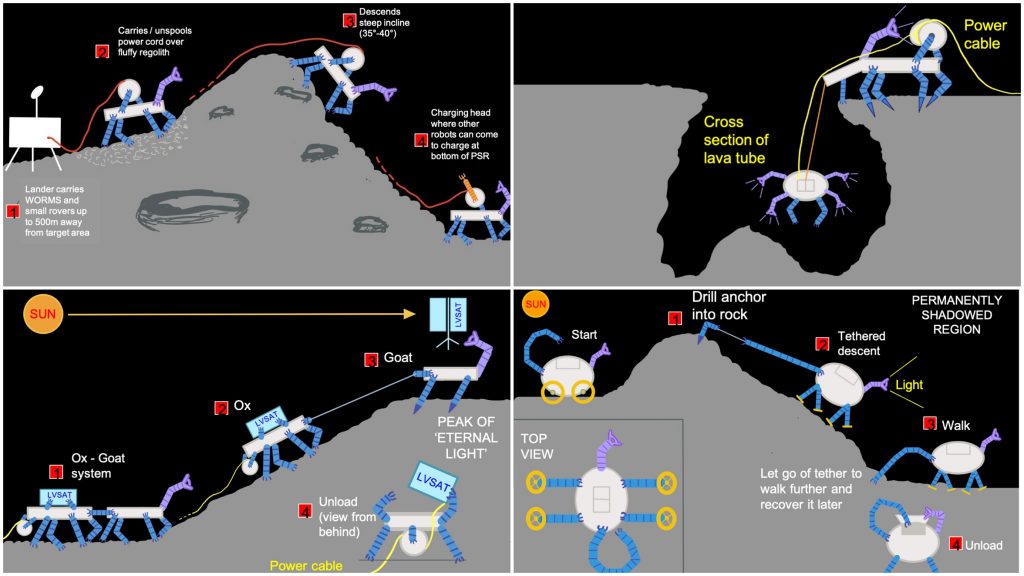
WORMS is a modular architecture where the robotic mobility capability to access extreme lunar terrain emerges from the swarm-like integration of a small (“oligomeric”) set of nearly-identical, articulating “worms.” Mimicking arms, legs, and backbones, WORMS can be configured into diverse walking robots with a payload capacity from kilograms to tons.
Critical innovations include the Universal Interface Block, which permits rigid coupling and electrical power transfer between architecture elements. The Species Modules confer special skills to individual worms, enabling the emergence of higher-level functions through the synergistic, symbiotic collaboration of different worm species in a robot configuration. Each new robot configuration requires worms, accessories, species modules, and software. Any known robot configuration can be assembled in the field by a non-specialist in minutes to hours and assigned to its task. WORMS robots can be repaired easily in the field by simply replacing the disabled component. The architecture is designed to be a resilient, easily maintained, low-cost system with enough versatility and flexibility to make it future-proof.
The WORMS architecture aligns with NASA’s Plan for Sustained Lunar Exploration and Development and growing interest to establish a permanent presence near the lunar south pole. NASA and its commercial and international partners are likely to have substantial evolving, diverse, and growing needs for infrastructure development and robotic mobility support on the surface of the Moon for years to come. Accordingly, the WORMS architecture aims to deliver both present and future value. WORMS will be a mass-producible, reconfigurable, reusable and scalable system that could enable future extreme terrain access and lunar infrastructure development.
WORMS team members include Aleks Siemenn, Brooke Bensche, Cesar Meza, Cormac O’Neill, Cynthia Cao, George Lordos, Isabella Golemme, Jessica Rutledge, Jessica Wu, Jolie Bercow, Juan Salazar, Kyle Thompson, Michael Brown, Mindy Long, Paula do Vale Pereira, Prajwal Manesh, Sharmi Shah, Stephanie Howe, Yang Chen, Yosef Mihretie, and Zeyad Al Awwad. Faculty advisors include Jeffrey Hoffman, Olivier de Weck, David Trumper, Sangbae Kim, (MIT) and Wendell Chun (Denver University). Thank you to the project team industry partners Boston Dynamics, MassRobotics, and Robots5.

