A homotopic convex optimization approach for trajectory design in multi-body models
Astrodynamicists use various models to represent the gravitational influences of solar system bodies on a spacecraft’s trajectory. Convex optimization is a powerful tool for designing fuel-efficient paths, but it struggles with complex, high-fidelity models. ARCLab researchers propose a new approach that leverages low-fidelity models as an intermediate step, enabling convex optimization to effectively identify the best trajectory for a mission.
Authors: Kai Xi, Hakan Chunton, Christian Hoffman, Giovanni Lavezzi, Ethan Ryan Burnett, Francesco Topputo, Richard Linares
Citation: 2025 AAS/AIAA Spaceflight Mechanics Meeting, Kaua’i Hawaii, January 19-23
Abstract:
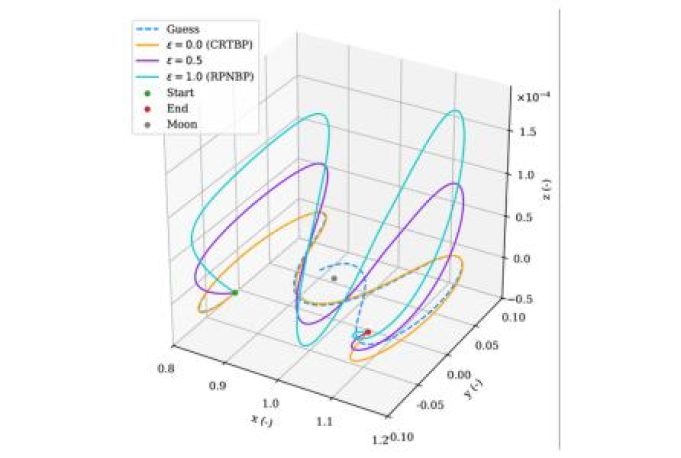
The moon is poised to be a key focus in human space exploration, with numerous missions planned in the near future. Spacecraft missions in the cislunar region require optimized trajectory and mission design within complex multi-body models. We propose a sequential convex programming (SCP) approach for designing trajectories with impulsive maneuvers in multi-body models and transitioning them into an ephemeris model. We make use of a pulsating-rotating frame and a homotopic approach to enhance convergence. The high accuracy and robustness make SCP an excellent alternative to nonlinear programming solvers, even for highly nonlinear problems.