Rotating synthetic aperture space telescope pointing control demonstration and scalability analysis
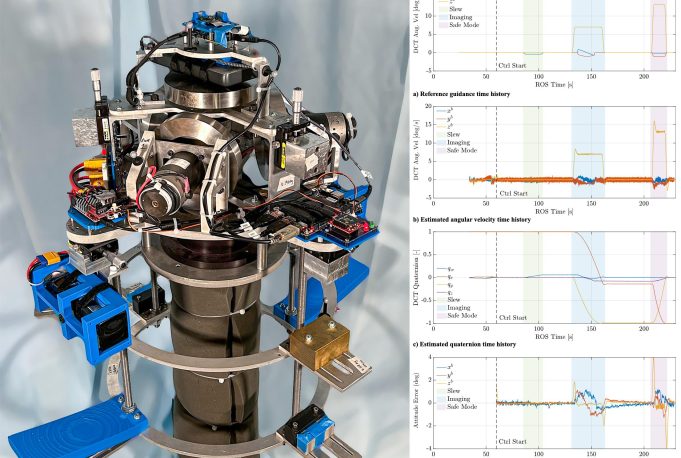
Researchers in the Space Systems Lab demonstrate accurate pointing control of a dynamically-similar rotating synthetic aperture space telescope using a three rotational degree-of-freedom hardware testbed.
Authors: Alejandro D. Cabrales Hernandez, Evan L. Kramer, Rebecca A. Masterson, Joseph J. Green, and David W. Miller
Citation: Journal of Spacecraft and Rockets (2025): 1-16
Abstract:
Rotating synthetic apertures (RSA) are a class of dilute aperture imaging systems that can unlock the design space of low-mass, low-cost, and high-resolution space telescopes. Instead of a traditional circular aperture, RSAs employ a high-aspect-ratio rectangular strip mirror that spins about a principal optical axis. Formation of images with comparable resolution to circular apertures is possible by processing a sequence of images captured during rotation. Slewing and spinning RSA imaging dynamics pose a significant control challenge. To this end, this work demonstrates accurate pointing control of a three-rotational-degrees-of-freedom (3- rotational-DOF) testbed with inertially similar properties to an RSA. An overview of the testbed and guidance, navigation, and control algorithms for RSA imaging maneuvers is presented. Scaling laws to extrapolate experimental results of control performance to low and medium Earth orbit are derived. Experimental 3- rotational-DOF testbed results validate the control algorithm’s ability to perform an RSA imaging maneuver within 1-deg pointing accuracy and 0.6-deg pointing accuracy when tested on a static bench-top testbed. Scaling results bound a set of orbital regimes compatible with RSA dynamics and identify a design space for RSAs compatible with current small-satellite attitude control system capabilities.