Safe human-robot interaction and planning

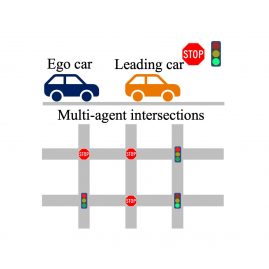
In order for robots to move safely and confidently from the lab to the workplace, they must be able to not only interact safely with nearby humans but respond intelligently to human users’ instructions. To enable robots to successfully augment humans, we develop techniques for ensuring both the physical safety and intelligent responsiveness of robot agents in responding to complex human instructions.
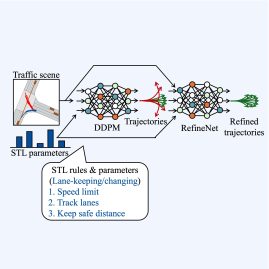
To transform human instructions to executable robot commands, we leverage signal temporal logic (STL) and develop approaches using optimization methods (mixed integer programming, nonlinear programming, etc). We are broadly interested in the following open questions:
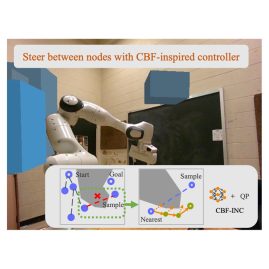
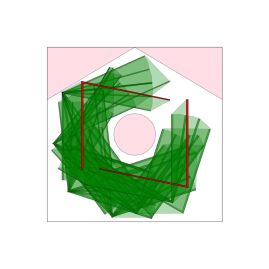
- How can we accelerate existing search-based and optimization-based algorithms to solve these planning problems?
- How can we learn temporal reasoning from natural language?
- When should a robot ask for human help to avoid getting stuck while performing a task?