LLM-based human-machine interaction

The current robot planning lacks the generalizability over various tasks and conditions. We combine Foundation Models with symbolic computing for the general planning and decision making of real and virtual robots, such as task and motion planning of drones/manipulators, and planning of travel planner and website agent, etc.
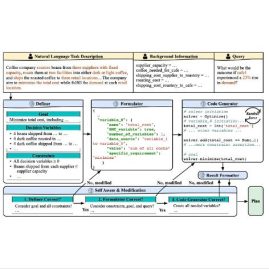
To enhance the planning capability of LLMs over tasks involving complex geometrical, temporal, logical, and optimization constraints, we combine LLMs with symbolic planners/solvers, such as STL/PDDL/SMT based planners or steer LLMs to plan with code generation. We also implement model finetuning, automatic prompt optimization, LLM framework optimization to enhance the task performance of LLMs in planning.