ICRA 2025 Paper Announcements
We are excited to announce that REALM will be presenting five papers at ICRA 2025! Below you can find a brief description and dedicated project website for each paper.
Presentation & Talk Information:
(Georgia World Congress Center, Building A)
May 20 (Tuesday)
- (TuAT24.2) 10:00-10:05; Testing and Validation Session (Room 401); Learning-Based Bayesian Inference for Testing of Autonomous Systems; Anjali Parashar, Ji Yin, Charles Dawson, Panagiotis Tsiotras, Chuchu Fan
- (TuAT9.7) 10:25-10:30; Motion Planning 1 Session (Room 312); Rigid Body Path Planning Using Mixed-Integer Linear Programming; Mingxin Yu, Chuchu Fan
May 21 (Wednesday)
- (WeAT10.2) 08:35-08:40; Multi-Robot Path Planning 1 Session (Room 313); A Hierarchical Framework for Solving the Constrained Multiple Depot Traveling Salesman Problem; Ruixiao Yang, Chuchu Fan
- (WeDT1.1) 15:15-15:20; Autonomous Vehicles 1 Session (Room 302); Diverse Controllable Diffusion Policy with Signal Temporal Logic; Yue Meng, Chuchu Fan
May 22 (Thursday)
- (ThBT17.2) 10:00-10:05; Planning, Scheduling and Coordination Session (Room 405); Reliable and Efficient Multi-Agent Coordination Via Graph Neural Network Variational Autoencoders; Yue Meng, Nathalie Majcherczyk, Wenliang Liu, Scott Kiesel, Chuchu Fan, Federico Pecora
- (Keynote Session) 11:15-12:40; Safety & Formal Methods Keynote Session (Sidney Marcus Auditorium); Graph Control Barrier Function for Large-Scale Multi-Agent Safe Control; Chuchu Fan
Rigid Body Path Planning using Mixed-Integer Linear Programming
Mingxin Yu, Chuchu Fan
Non-REALM Affiliation: N/A

Brief Description: Our research tackles a common challenge in robotics – how to efficiently move large objects through cluttered spaces with narrow passages. While existing methods become slower and less effective as spaces get larger or more complex, we developed a new three-stage approach that breaks down the problem into manageable pieces with rigorous mathematical tools. By first creating a map of safe zones, then pre-computing possible traversing paths between them, and finally using this information to quickly plan routes, our method achieves better performance than current solutions.
Project Website: https://sites.google.com/view/realm-rigidmilp/home
- Developed a novel three-stage planning algorithm that solves multiple small planning problems instead of one large complex optimization problem
- Decomposed safe navigation spaces into a network of connected areas in the workspace, making it efficient in covering narrow passages
- Formulated the traversal between regions into optimization problem, where the size of each problem doesn’t scale with the environment
- Successfully tested and validated the approach in both 2D and 3D environments, showing better scalability as spaces become larger and better performance when narrow passages are presented.
Learning-based Bayesian Inference for Testing of Autonomous Systems
Anjali Parashar, Ji Yin1, Charles Dawson, Panagiotis Tsiotras1, Chuchu Fan
Non-REALM Affiliation: 1. Georgia Institute of Technology

Brief Description: Our method combines learning based techniques with accelerated gradient based sampling for discovering failures in autonomous systems. We propose a method using Variational AutoEncoders (VAEs) to learn a low dimensional latent space for sampling sequential failure scenarios requiring temporal consistency such as discovering trajectories that cannot be tracked by a vehicle. To enhance sampling efficiency, we use Neural Projection Operator (NPO) to sample within constrained spaces. We combine these with second-order Langevin algorithm for gradient-based sampling, balancing faster convergence and search space exploration to avoid getting stuck in local minima. The combined technique is demonstrated across three applications of failure discovery for ground vehicles for sampling failure trajectories and obstacle collisions. We also validate the discovered failures on Autorally and F1Tenth platform by demonstrating the failures in realtime.
Project Website: https://mit-realm.github.io/neural-langevin-website/
- Our method is able to discover failures associated with a low probability of occurence with a higher success rate of failure discovery with almost an order of magnitude fewer samples than Random sampling.
- The combined effect of using Neural Projection Operator (NPO) with second-order gradient-based sampling yields a failure discovery rate of 0.44 compared to 0.17 for Random sampling, which demonstrates the efficient sampling characteristics of our method.
- Our method balances optimization with sufficient exploration, leading to diverse failure cases for high dimensional scenarios by exploring in a low dimensional latent space learnt by VAE.
- We also provide hardware validation of discovered failures on the AutoRally platform and the F1Tenth platform across two different scenarios for failure.
Diverse Controllable Diffusion Policy with Signal Temporal Logic
Yue Meng, Chuchu Fan
Non-REALM Affiliation: N/A
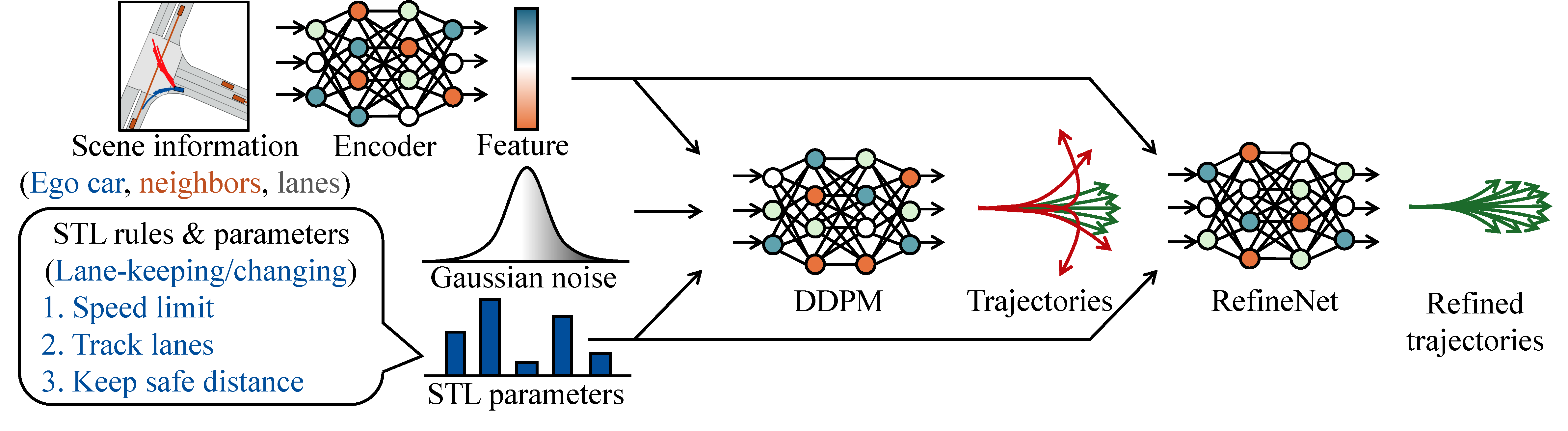
Brief Description: Introducing a novel approach leveraging Signal Temporal Logic (STL) and diffusion models, our method generates diverse, rule-compliant trajectories for autonomous driving simulations. We first calibrate the STL on the real-world data, then generate diverse synthetic data using trajectory optimization, and finally learn the rectified diffusion policy on the augmented dataset. We test our approach on the NuScenes driving data. Achieving superior performance compared to baselines, our approach offers efficient runtime and high rule satisfaction rates.
Project Website: https://mengyuest.github.io/pSTL-diffusion-policy/
- Combine Signal Temporal Logic with diffusion models to create diverse, rule-compliant simulation policies.
- A novel RefineNet as a post-processing module to improve trajectory rule compliance and diversity.
- Achieve superior diversity and rule satisfaction in open-loop tests, with the flexibility to conditionally vary behaviors based on STL parameters.
Hierarchical Framework for Solving the Constrained Multiple Depot Traveling Salesman Problem
Ruixiao Yang, Chuchu Fan
Non-REALM Affiliation: N/A

Brief Description: This work addresses the challenge of modeling energy constraints in multi-agent robotic task planning. We introduce a new problem called constrained multi-depot traveling salesman problem (CMDTSP), building upon MDTSP with realistic constraints on energy and resource consumption to avoid infeasible or unsafe solutions in practice, and propose a hierarchical framework that decomposes CMDTSP into tractable sub-problems for efficient approximation. Cities are first allocated to agents via a Minimum Spanning Tree-based heuristic, followed by efficient TSP tour generation and a lightweight Mixed-Integer Linear Programming (MILP) formulation to resolve energy constraints. Extensive evaluations on real-world roadmaps and synthetic benchmarks demonstrate the framework’s superiority, achieving a 5.22%–14.84% reduction in tour length, over 79.8x speedup compared to state-of-the-art baselines, and scalability to 1100-city instances where exact methods fail. With a mean optimality gap of 12.48%, this approach balances computational efficiency and solution quality, enabling robust, large-scale task planning for energy-constrained multi-robot systems in logistics, surveillance, and delivery applications.
Project Website: https://mit-realm.github.io/CMDTSP/
- Introduces CMDTSP, a new problem modeling energy constraints, charging stations, and resource limits for multi-robot systems.
- Splits complex planning into city allocation by graph heuristics and lightweight MILP-based refinement, enabling scalable solutions for large problem sizes.
- Outperforms state-of-the-art methods with shorter routes and 80x faster computation, even for 1,000+ destinations.
- Tested on urban logistics and delivery simulations, demonstrating practicality for applications like drone fleets or warehouse robots.
Reliable and Efficient Multi-Agent Coordination via Graph Neural Network Variational Autoencoders
Yue Meng, Nathalie Majcherczyk1, Wenliang Liu1, Scott Kiesel1, Chuchu Fan, Federico Pecora1
Non-REALM Affiliation: 1. Amazon Robotics

Brief Description: Imagine an automated warehouse where hundreds of robots work together seamlessly to complete complex tasks without collisions. Our project leverages Graph Neural Network Variational Autoencoders (GNN-VAE) to quickly generate global schedules that efficiently coordinate multi-robot movements. We recast coordination as a graph problem by gathering ground truth schedules through a Mixed-Integer Linear Program (MILP) solver and training our model to encode these solutions in a latent space. At inference time, solution samples are decoded from the sampled latent variables, and the lowest-cost sample is selected for coordination. By construction, our GNN-VAE framework returns solutions that always respect the constraints of the considered coordination problem. Numerical results show that our approach trained on small-scale problems can achieve high-quality solutions even for large-scale problems with 250 robots, being much faster than other baselines.
Project Website: https://mengyuest.github.io/gnn-vae-coord/
- Leverage GNN-VAE to encode MILP-derived schedules, enabling efficient coordination of multi-robot systems.
- Recast the coordination challenge as a graph problem, ensuring all solutions strictly satisfy operational constraints.
- Experiments demonstrate that our method scales to 250 robots, delivering high-quality solutions 10-20 times faster than classical approaches.